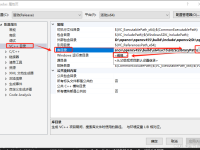
根据相机的旋转矩阵和相机的内参就可以计算出每个语言图像撒好难过点对应到世界坐标系的坐标点,假设语言图像的坐标点是(x,y),通过矩阵的计算就可以获取到世界坐标(wx,wy,wz)(注:具体的计算公式和原理网上都可以搜索到,这里就不在详细的说明),由于当前投影的实际坐标一般都是平面的投影,例如就是俯视图像投影,一般都投影到地面上,需要将平面的投影重新计算乘曲面的投影,当前的算法使用的就是将平面和球面相机和的碗型投影。
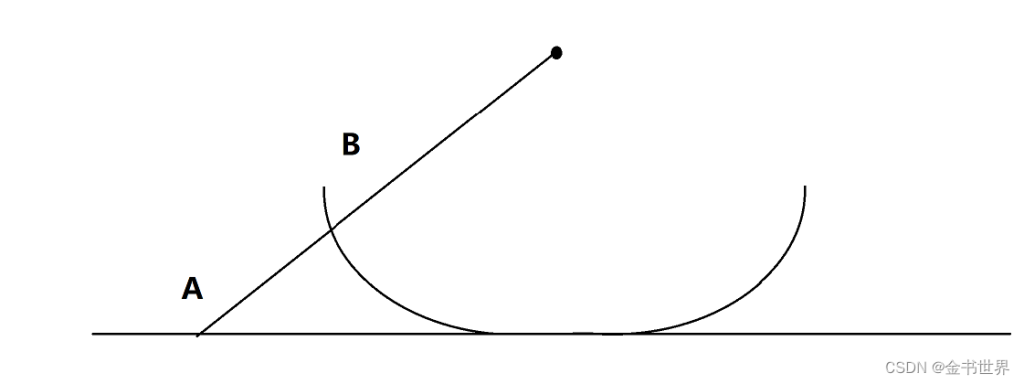
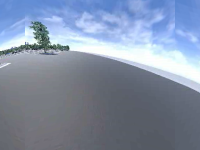
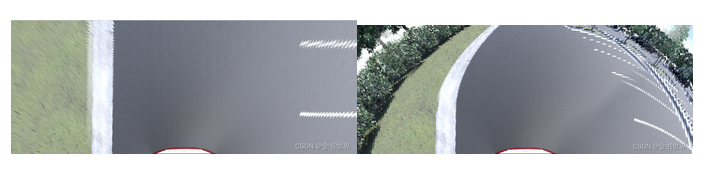
将投影平面上A点通过等距投影的方式就可以计算出B点坐标,所一就有A点的世界坐标A(wx,wy,wz)转换成B点的世界坐标B(wx,wy,wz),展现在每个视角上的投影就如下所示:
前视平面转碗型投影
-=||=-赞 (8)