
登录
注册
联系我们:

金书世界

金书世界
金书世界
金书世界

下载测试工程后可以根据《自动驾驶ADAS算法–测试工程环境搭建-CSDN博客》完成环境的搭建。 测试的exe程序,无需解压码就可以体验算法测试效果(...
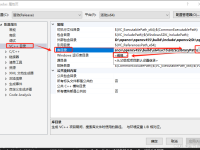
测试环境 1、vs2022社区版本 2、onnx 3、opencv455测试环境搭建和需要的文件下载 通过网盘分享的文件:附件链接: https://pan.b...

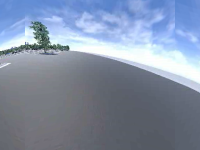
c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–超广角模式/转向模式/3D碗型投影模式/窄边模式/车轮模式等的实现》本文档进...

c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–超广角模式/转向模式/3D碗型投影模式/窄边模式/车轮模式等的实现》本文档进...
c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–更新超广角视图算法和exe测试demo》本文档进用于展示部分代码的视线,获取方式网盘自行...

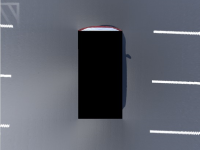
c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–540度全景的算法实现和exe测试demo》本文档进用于展示部分代码的视线,...

c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–3D碗型投影模式的exe测试工具》本文档进用于展示部分代码的视线,获取方式网...
c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–全景的俯视图像和原图》本文档进用于展示部分代码的视线,获取方式网盘自行获取(...

0、搭建开发环境 当前的测试根据一下的步骤并修改源码是可以实现yolov8的板端运行,如果不想再搭建环境和测试代码bug上浪费更多的时间可以直接获取本人的测试虚...
1、测试环境 2、使用的编程语言 3、测试的demo的获取 更新:测试的exe程序,无需解压码就可以体验算法测试效果 百度网盘: 链接:https://pan....