c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法–超广角模式/转向模式/3D碗型投影模式/窄边模式/车轮模式等的实现》本文档进用于展示部分代码的视线,获取方式网盘自行获取(非免费介意勿下载):链接: https://pan.baidu.com/s/1efkGvbmuaOnKQJhUWD2h5A 提取码: e7nt 。
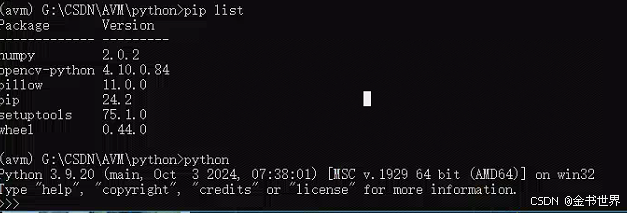
测试的环境:
以下是主运行函数的部分代码(仅供参考):
import cv2
from runNarrowEdge import *
# 导入 MyClass 类
from runNarrowEdge import avmobjData
FB=0#设置前后视角 0前视 1后视
# 创建类的实例
runNarrowEdge = avmobjData()
L_open=True
R_open=True
L_video=cv2.VideoCapture("video/Left.avi")
if L_video.isOpened():
L_ocpn,L_frame=L_video.read()
else:
L_open=False
R_video=cv2.VideoCapture("video/Right.avi")
if R_video.isOpened():
R_ocpn,R_frame=R_video.read()
else:
R_open=False
#初始化函数
runNarrowEdge.init(FB)
#cv2.imshow("resize_CarImage",resize_CarImage)
# 创建一个三通道的彩色图像(RGB),初始值为 0(黑色)
Dstimg = np.zeros((JS_AVM_IMGH, JS_AVM_IMGW, 3), dtype=np.uint8)
while L_open and R_open:
L_ret,L_frame=L_video.read()
R_ret,R_frame=R_video.read()
if L_frame is None or R_frame is None is None:
break
if L_ret==True and R_ret==True:
runNarrowEdge.run(L_frame,R_frame,Dstimg,FB)
Dstimg=runNarrowEdge.drawTxt(Dstimg)
runNarrowEdge.js_DrawLine(Dstimg,FB)
cv2.imshow("avmNarrowEdge",Dstimg)
if cv2.waitKey(25) & 0xFF==27:
break
L_video.release()
R_video.release()
cv2.destroyAllWindows()
注:当前python的版本效率比较低,需要加速的可以自行优化加速代码,实现的过程是从C代码直接转换过来的,没有进行任何的优化加速。
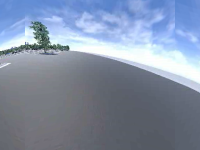
测试实现的效果:
前视
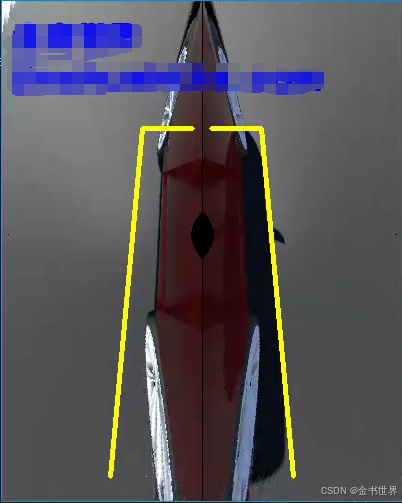
后视
-=||=-赞 (23)