畸变矫正模型
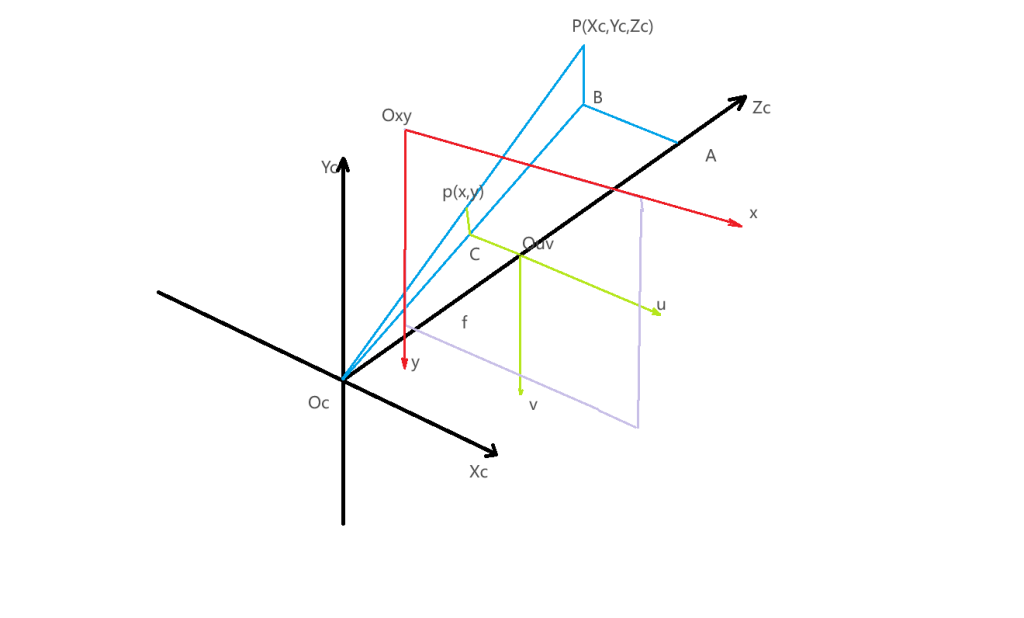
1、平面相机的成像和坐标系如下所示
说明
1、f(ud,vd)就是以图像中心为原点坐标(和p(x,y)坐标相对,就是坐表原点不同)。
2、p(x,y)就是在图像坐标系下的坐标点,坐标点的为图像的左上角点,这个和世界图像的保存数据的坐标一直。
3、假设xy坐标系的原点是uv坐标系的中点,相对的偏移量为cx和cy,就可以得出ud=x+cx,vd=y+cy。
4、P(Xc,Yc,Zc)就是相机坐标系下的坐标。
根据相似的三角形可以得出
AB/COuv=AOc/OcOuv=PB/pC=Xc/ud=Zc/f=Yc/vd
得出
Xc/ud=Zc/fx
Yc/vd=Zc/fy
得出
ud=fx(Xc/Zc)
vd=fy(Yc/Zc)
得出
x=fx(Xc/Zc)-cx
y=fy(Yc/Zc)-cy
2、鱼眼相机的成像坐标变换
参考:https://ww2.mathworks.cn/help/vision/ug/fisheye-calibration-basics.html
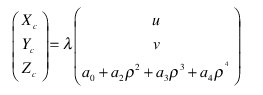

由上述的公式可以得出
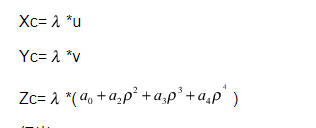
得出

有平面相机公式
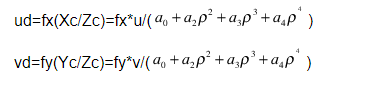
上述公式中的ud和vd就是平面图像的坐标点,u和v 就是鱼眼图像坐标
根据上述的的计算公式就可以实现图像的畸变矫正
-=||=-赞 (6)