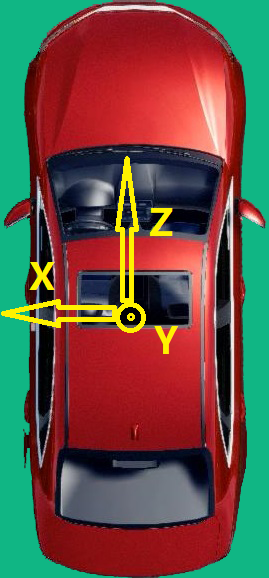
1、算法的坐标轴定义如下所示
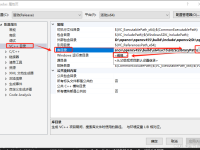
2、相机的安装位置说明,和代码相对应
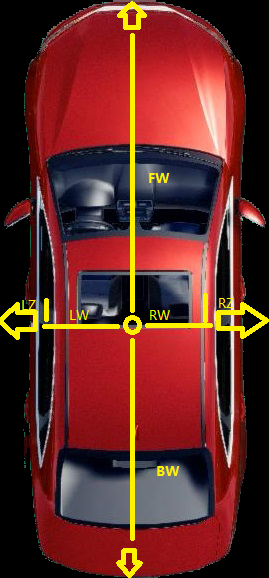
由于当前的安装左右两侧的相机是在车的中心上说以LZ和RZ参数是0。
3、相机的安装高度说说明
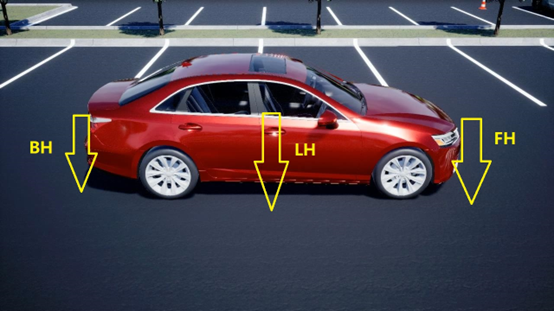
注:右侧的相机安装高度和左侧相同,参数BH就是CameraH_B,LH是CameraH_L,FH是CameraH_F。
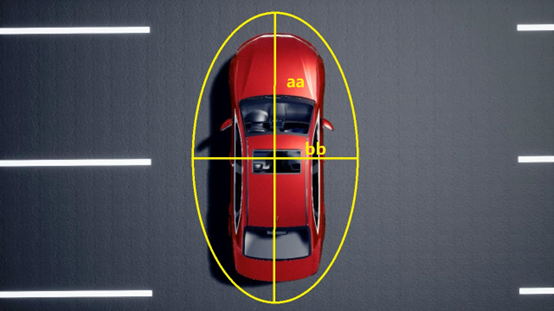
4、虚拟相机的椭圆定义
aa和bb就是椭圆方程参数,虚拟相机就在这个椭圆上一定不同的位置,相机的高度就是CameraH_A参数,可以根据自己的需要自行设置。
-=||=-赞 (5)
金书世界

金书世界

1、算法的坐标轴定义如下所示
2、相机的安装位置说明,和代码相对应
由于当前的安装左右两侧的相机是在车的中心上说以LZ和RZ参数是0。
3、相机的安装高度说说明
注:右侧的相机安装高度和左侧相同,参数BH就是CameraH_B,LH是CameraH_L,FH是CameraH_F。
4、虚拟相机的椭圆定义
aa和bb就是椭圆方程参数,虚拟相机就在这个椭圆上一定不同的位置,相机的高度就是CameraH_A参数,可以根据自己的需要自行设置。