测试工程和视频:
链接:https://pan.baidu.com/s/11GNLuIxcONGCeobp0MbXFQ?pwd=0z6l 提取码:0z6l
1、平面相机的成像和坐标系如下所示
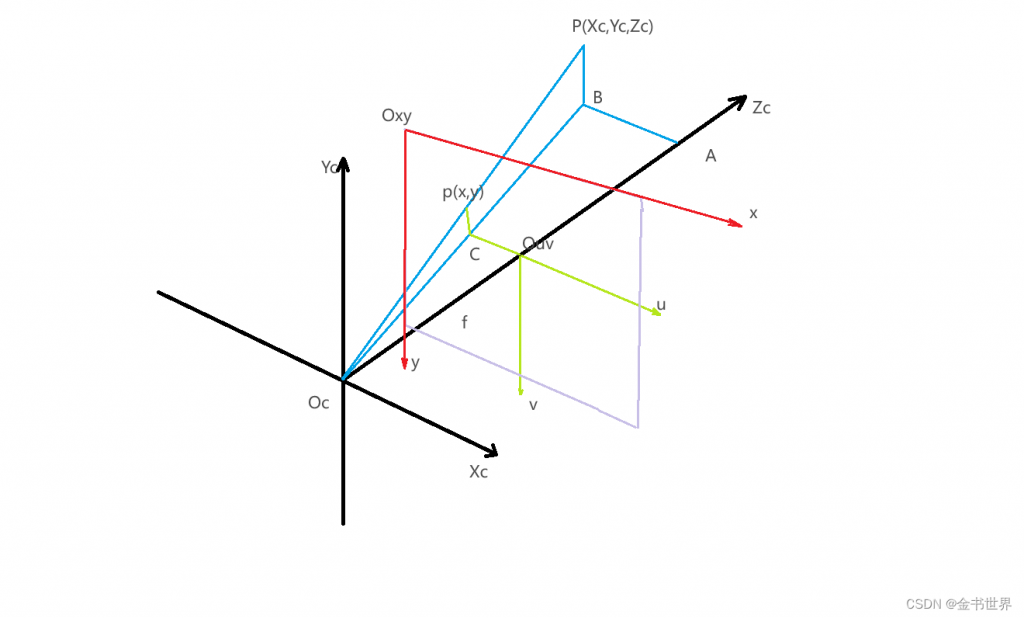
说明
1、f(ud,vd)就是以图像中心为原点坐标(和p(x,y)坐标相对,就是坐表原点不同)。
2、p(x,y)就是在图像坐标系下的坐标点,坐标点的为图像的左上角点,这个和世界图像的保存数据的坐标一直。
3、假设xy坐标系的原点是uv坐标系的中点,相对的偏移量为cx和cy,就可以得出ud=x+cx,vd=y+cy。
4、P(Xc,Yc,Zc)就是相机坐标系下的坐标。
根据相似的三角形可以得出
AB/COuv=AOc/OcOuv=PB/pC=Xc/ud=Zc/f=Yc/vd
得出
Xc/ud=Zc/fx
Yc/vd=Zc/fy
得出
ud=fx(Xc/Zc)
vd=fy(Yc/Zc)
得出
x=fx(Xc/Zc)-cx
y=fy(Yc/Zc)-cy
2、鱼眼相机的成像坐标变换
参考:https://ww2.mathworks.cn/help/vision/ug/fisheye-calibration-basics.html
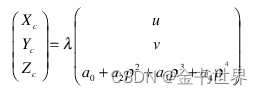

由上述的公式可以得出
上述公式中的ud和vd就是平面图像的坐标点,u和v 就是鱼眼图像坐标
根据上述的的计算公式就可以实现图像的畸变矫正
测试代码如下所示
void CjsAVMtoolDlg::OnBnClickedButton1()
{
// TODO: 在此添加控件通知处理程序代码
//MFC弹出命令窗体
AllocConsole();
freopen("CONOUT$", "w", stdout);
//MFC弹出命令窗体
// TODO: 在此添加控件通知处理程序代码
float a[4] = { 160,-0.0005,0,0 };
int cx = 640, cy = 360;//图像的中心点
float fx = 100, fy = 100;//虚拟焦距
float p = 0.0;
Mat src = imread("test.jpg");
Mat dst(src.rows, src.cols, CV_8UC3, Scalar(0, 0, 0));
if (src.empty()) {
printf("不能加载图像!\n");
}
namedWindow("原图", WINDOW_AUTOSIZE);
imshow("原图", src);
//像素读取方式:直接读取
int height = src.rows;
int width = src.cols;
int ch = src.channels();
js_Transplane2Fisheye_V1(&dst, src, a, fx, fy, cx, cy);
//js_Transplane2Fisheye_V2(&dst, src, a, fx, fy, cx, cy);
imshow("直接读取像素图", dst);
}
int js_Transplane2Fisheye_V1(Mat *Dst,Mat Src,float *a,float fx,float fy,int cx,int cy)
{
for (int row = 0; row < Src.rows ; row++) {//h
for (int col = 0; col < Src.cols; col++) {//w
float x1 = ((float)(col - cx));
float y1 = ((float)(row - cy));
float p = sqrtf(x1 * x1 + y1 * y1);
float x2 = x1 / (a[0] + a[1] * p * p + a[2] * p * p * p + a[3] * p * p * p * p);
float y2 = y1 / (a[0] + a[1] * p * p + a[2] * p * p * p + a[3] * p * p * p * p);
int ud = fx * x2 + cx + 0.5;
int vd = fy * y2 + cy + 0.5;
if (((ud >= 0) && (ud < Src.cols)) && ((vd >= 0) && (vd < Src.rows)))
{
Dst->at<Vec3b>(vd, ud) = Src.at<Vec3b>(row, col);
}
}
}
return 0;
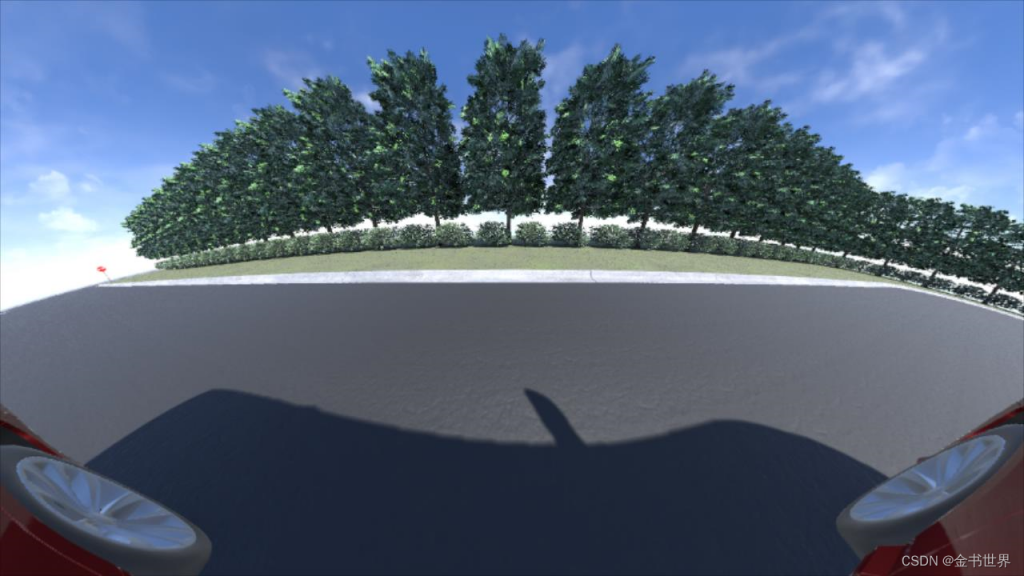
}测试图片和测试结果(测试结果图像存在无效的计算点)
输入图像
校正后图像
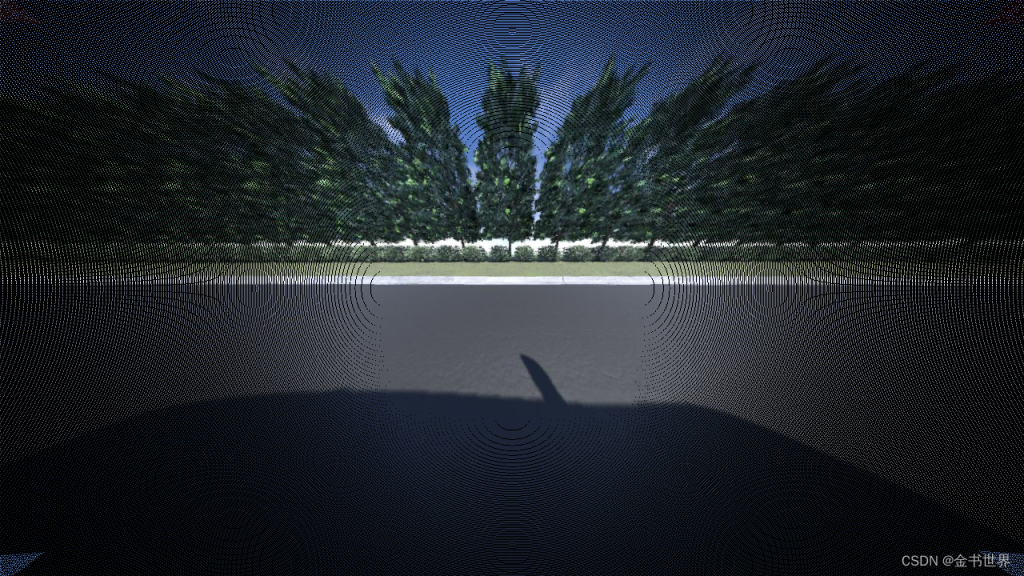
由于当前计算是完成算法的畸变矫正存在一定的流程缺陷,以下是升级版本后的测试结果
主要是使用迭代的当时计算
f(x+△x)=f(x)+△x*f‘’(x)
得出
(f(x+△x)-f(x))/f‘’(x)=△x
得出
(f(cur)-f(pre))/f'(pre)=cur-pre
得出
cur=pre+(f(cur)-f(pre))/f‘(pre)
每次计算完成后会更新cur之后将cur幅值给pre继续迭代,知道cur和pre的插值达到阈值后停止迭代或者是计算次数达到阈值后停止,就可以计算出坐标点cur的值。

测试视频