源码工程:
链接:https://pan.baidu.com/s/1_f7hiRlS5I8ABajAFPT-hw?pwd=vjcm提取码:vjcm
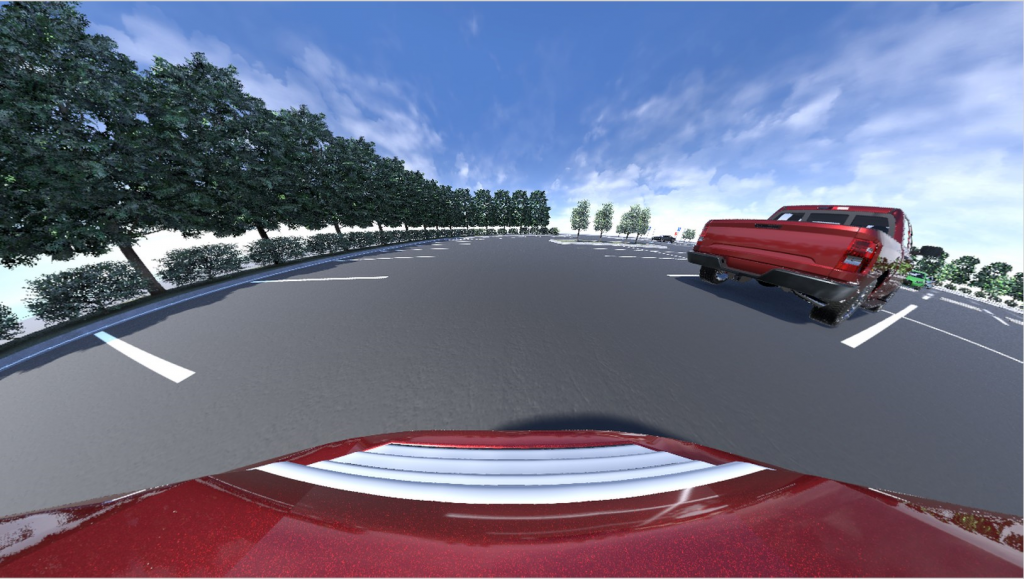
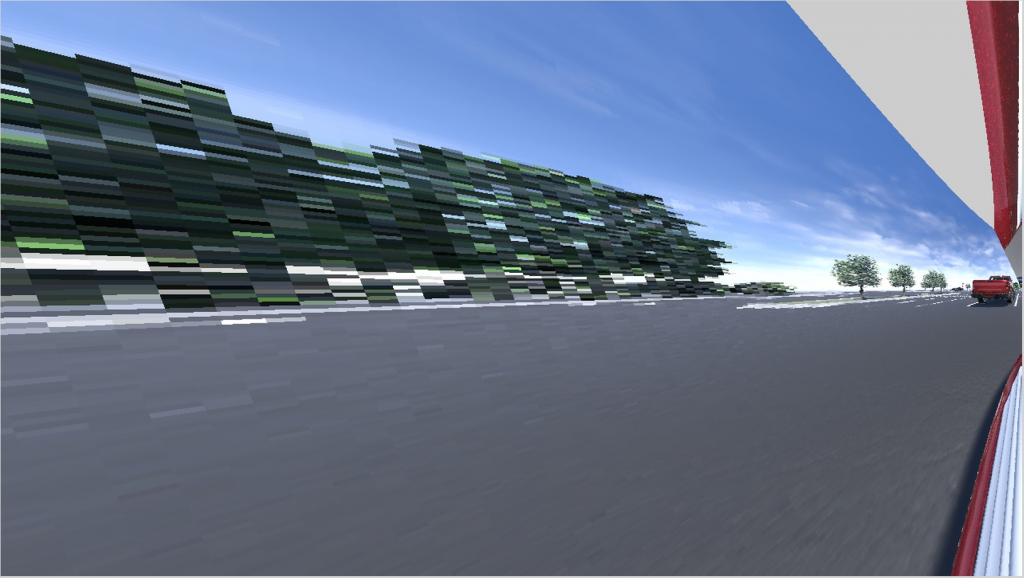
主要是根据需求实现不同视角的自由切换,当前实现是俯视图想、左视图像和右视图像的输出,测试结果参见下图:
原始图
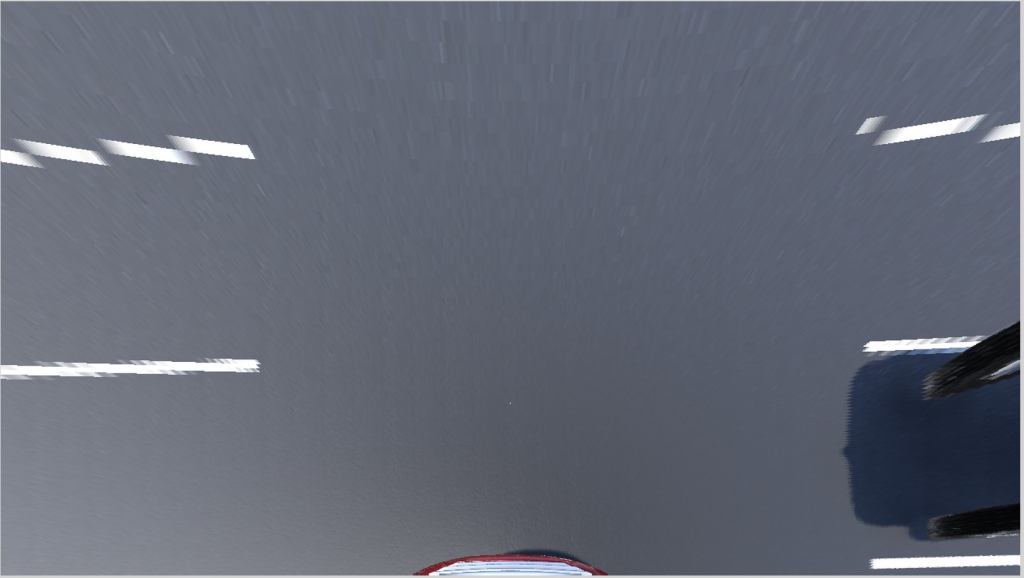
俯视图
左视图
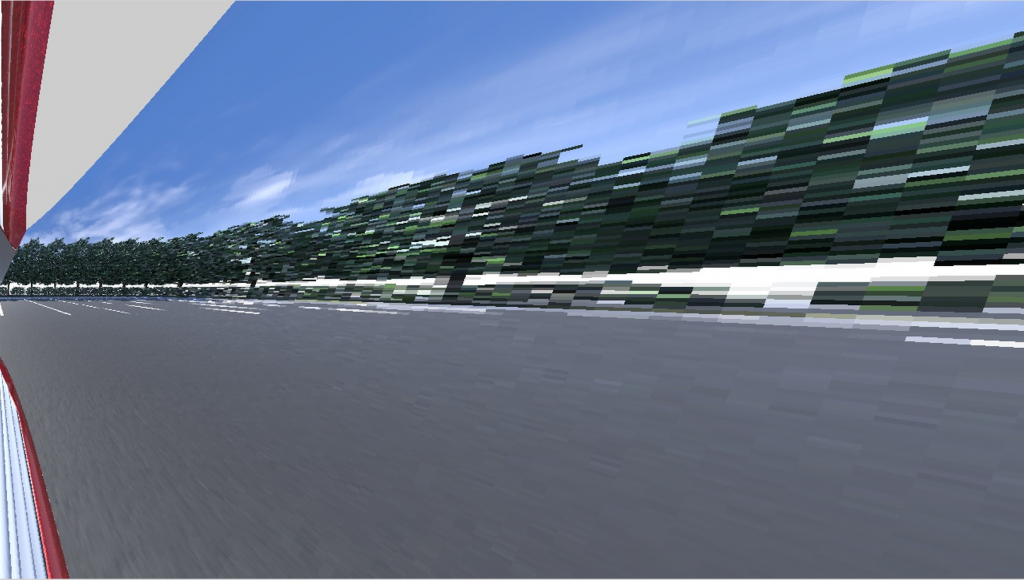
右视图
当前使用的摄像头安装位置(白色三角的位置就是摄像头的安装位置)

算法的实现
1、根据视角的不同设置不同的相机的旋转矩阵
俯视图像的旋转矩阵设置如下所示
js_initAngle(data_TOP, 90, 0, 0);坐视图像的旋转矩阵设置如下所示
js_initAngle(data_TOP, 0, 90, 0);右视图像的旋转矩阵设置如下所示
js_initAngle(data_TOP, 0, *90, 0);2、初始化相机实际安装的位置参数
js_initAngle(data_0, 25, 0, 0);3、初始化相机的内参参数
float a[4] = { 160,-0.0005,0,0 };4、遍历图像每个点坐标实现坐标的变换并输出各个视图的图像
图片的测试代码
IplImage* img = cvLoadImage("test1.jpg");
IplImage* det_TOP = cvCreateImage(cvSize(img->width, img->height), img->depth, img->nChannels);
IplImage* det_LEFT = cvCreateImage(cvSize(img->width, img->height), img->depth, img->nChannels);
IplImage* det_RIGHT = cvCreateImage(cvSize(img->width, img->height), img->depth, img->nChannels);
js_getPlaneImag_TOP(img->imageData, det_TOP->imageData, img->width, img->height, img->nChannels);
js_getPlaneImag_LEFT(img->imageData, det_LEFT->imageData, img->width, img->height, img->nChannels);
js_getPlaneImag_RIGHT(img->imageData, det_RIGHT->imageData, img->width, img->height, img->nChannels);
cvShowImage("img", det_TOP);
cvWaitKey(0);图片的测试结果
视频的测试代码
// TODO: 在此添加控件通知处理程序代码
IplImage* det_TOP = cvCreateImage(cvSize(1280, 720), 8, 3);
IplImage* det_LEFT = cvCreateImage(cvSize(1280, 720), 8, 3);
IplImage* det_RIGHT = cvCreateImage(cvSize(1280, 720), 8, 3);
IplImage* detROI = cvCreateImage(cvSize(384, 216), 8, 3);
CvVideoWriter* writer = cvCreateVideoWriter("Front_TOP_Result.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 720));
cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
CvCapture* capture = cvCreateFileCapture("Front.avi");
IplImage* frame;
while (frame = cvQueryFrame(capture))
{
js_getPlaneImag_TOP(frame->imageData, det_TOP->imageData, frame->width, frame->height, frame->nChannels);
js_getPlaneImag_LEFT(frame->imageData, det_LEFT->imageData, frame->width, frame->height, frame->nChannels);
js_getPlaneImag_RIGHT(frame->imageData, det_RIGHT->imageData, frame->width, frame->height, frame->nChannels);
//鱼眼图像
cvResize(frame, detROI);
cvSetImageROI(det_TOP, cvRect((frame->width-384)/2, 0, 384, 216));
cvCopy(detROI, det_TOP);
cvResetImageROI(det_TOP);
//左侧图像
cvResize(det_LEFT, detROI);
cvSetImageROI(det_TOP, cvRect(0, 0, 384, 216));
cvCopy(detROI, det_TOP);
cvResetImageROI(det_TOP);
//右侧图像
cvResize(det_RIGHT, detROI);
cvSetImageROI(det_TOP, cvRect(det_RIGHT->width - 384, 0, 384, 216));
cvCopy(detROI, det_TOP);
cvResetImageROI(det_TOP);
cvWriteFrame(writer, det_TOP);
cvShowImage("视频播放", det_TOP);
char c = cvWaitKey(1);
if (c == 27)break;
}
cvReleaseVideoWriter(&writer);
cvReleaseCapture(&capture);
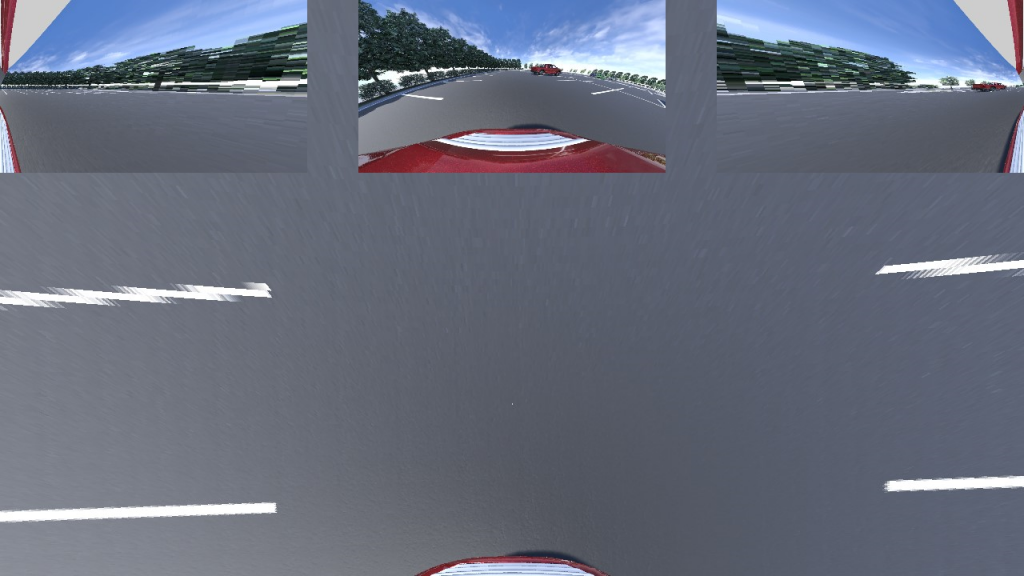
cvDestroyWindow("视频播放");视频测试结果
https://www.bilibili.com/video/BV1mW4y1c7cG/
-=||=-赞 (4)