540度全景影像是什么
540度全景影像是在360度全景影像基础上的升级功能,它增加了更多的摄像头来收集周围的图像数据。通常,这些摄像头分布在车辆的更多位置,例如车顶、车底等,以便更全面地捕捉车辆周围的情况。在开启全景影像功能时,这些摄像头收集的图像数据会被系统处理并拼接在一起,形成一个从车顶鸟瞰的全景俯视图。这种视图可以提供更全面的视野,帮助驾驶员更好地了解车辆周围的环境,从而提高驾驶安全性和便利性。
更新:测试的exe程序,无需解压码就可以体验算法测试效果
链接:https://pan.baidu.com/s/1iOFRd0bWQsbt7mx1ADvL-g 提取码:97nk
1、压缩包解压后显示如下所示
测试文件包括:可执行的exe文件、测试的视频等。
2.双击exe就可以运行测试程序,测试程序界面显示如下所示:
3、540度全景按钮如下所示

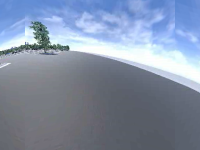
视频效果
https://www.bilibili.com/video/BV16waYeYEgB?t=183.2
https://www.bilibili.com/video/BV16waYeYEgB?t=82.9
AVM全景的多视图模式–549度全景
4、540全景算法实现代码如下所示
//MFC弹出命令窗体
AllocConsole();
freopen("CONOUT$", "w", stdout);
//MFC弹出命令窗体
int ww = 10;
cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE); //创建用于显示的窗体
sprintf(g_Test_Video_Path_D, "video1\\Down.avi");
sprintf(g_Test_Video_Path_F, "video1\\Front.avi");
sprintf(g_Test_Video_Path_B, "video1\\Back.avi");
sprintf(g_Test_Video_Path_L, "video1\\Left.avi");
sprintf(g_Test_Video_Path_R, "video1\\Right.avi");
IplImage* img_AVM_540 = cvCreateImage(cvSize(JS_AVM_IMGW, JS_AVM_IMGH), 8, 3);
CvVideoWriter* writer = cvCreateVideoWriter("result\\540.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(JS_AVM_IMGW, JS_AVM_IMGH));
CvCapture* C_img_F = cvCreateFileCapture(g_Test_Video_Path_F); //读取前视测试视频
CvCapture* C_img_B = cvCreateFileCapture(g_Test_Video_Path_B); //读取后视测试视频
CvCapture* C_img_L = cvCreateFileCapture(g_Test_Video_Path_L); //读取左视测试视频
CvCapture* C_img_R = cvCreateFileCapture(g_Test_Video_Path_R); //读取右视测试视频
CvCapture* C_img_D = cvCreateFileCapture(g_Test_Video_Path_D); //读取右视测试视频
IplImage* img_F, * img_B, * img_L, * img_R, * img_D; //定义各个视图的图像
IplImage* CarImage = cvLoadImage("top.png");
js_AVM_obj AVMData_540;
js_init_avm_540(&AVMData_540, img_AVM_540->width, img_AVM_540->height, 0);
IplImage* CarImageResize = cvCreateImage(cvSize(AVMData_540.RFsrc.x - AVMData_540.LFsrc.x + 2 * ww, AVMData_540.LBsrc.y - AVMData_540.LFsrc.y + 2 * ww), 8, 3);
cvResize(CarImage, CarImageResize);
int num = 0;
while (img_F = cvQueryFrame(C_img_F))
{
img_B = cvQueryFrame(C_img_B);
img_L = cvQueryFrame(C_img_L);
img_R = cvQueryFrame(C_img_R);
img_D = cvQueryFrame(C_img_D);
js_getAVM_540(&AVMData_540, img_AVM_540->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_D->imageData, img_F->width, img_F->height, img_AVM_540->width, img_AVM_540->height, img_AVM_540->nChannels, 0);
js_DrawCar(img_AVM_540, CarImageResize, AVMData_540.LFsrc.x - ww, AVMData_540.LFsrc.y - ww, CarImageResize->width, CarImageResize->height);
Mat img = cvarrToMat(img_AVM_540);
putTextZH(img, " 金书世界 \nwww.jinshushijie.com", CvPoint(10, 20), Scalar(0, 0, 255), 30, "楷体", false, false);
cvWriteFrame(writer, img_AVM_540);
cvShowImage("视频播放", img_AVM_540);
char c = cvWaitKey(1);
if (c == 27)break;
num++;
}
cvReleaseVideoWriter(&writer); //释放视频保存的结构体
cvReleaseCapture(&C_img_F); //释放前视的图像结构体
cvReleaseCapture(&C_img_B); //释放前视的图像结构体
cvReleaseCapture(&C_img_L); //释放前视的图像结构体
cvReleaseCapture(&C_img_R); //释放前视的图像结构体
cvReleaseCapture(&C_img_D); //释放前视的图像结构体
cvDestroyWindow("视频播放"); //释放显示的窗体 -=||=-赞 (4)