1、打开MATLABR2022a

2.打开Simulink
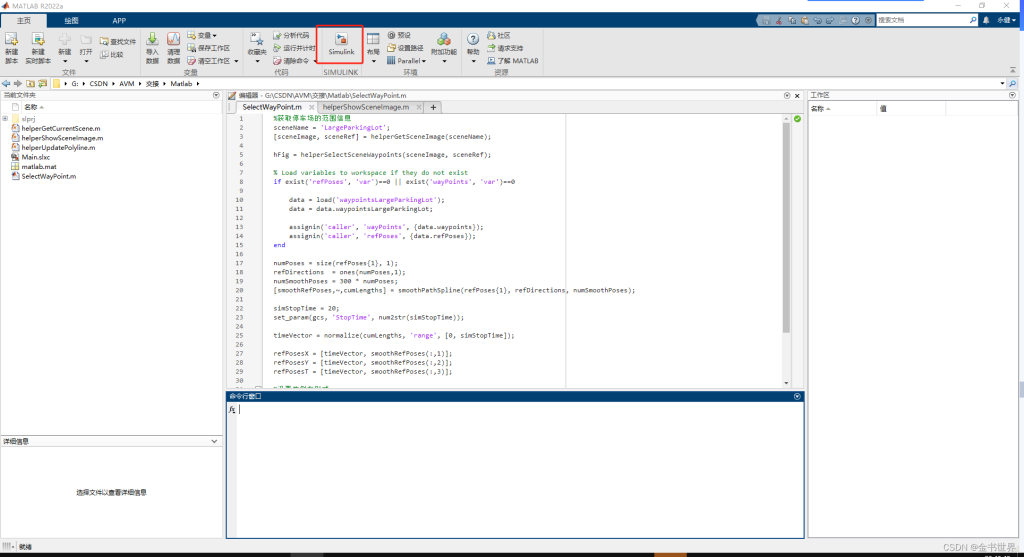
3、打开工程
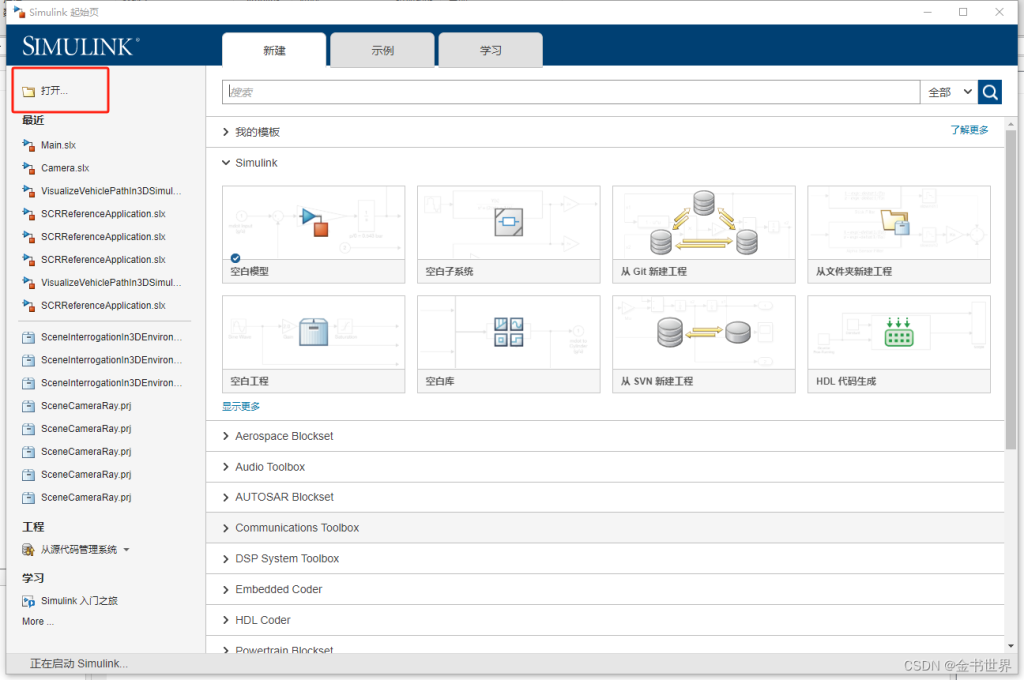
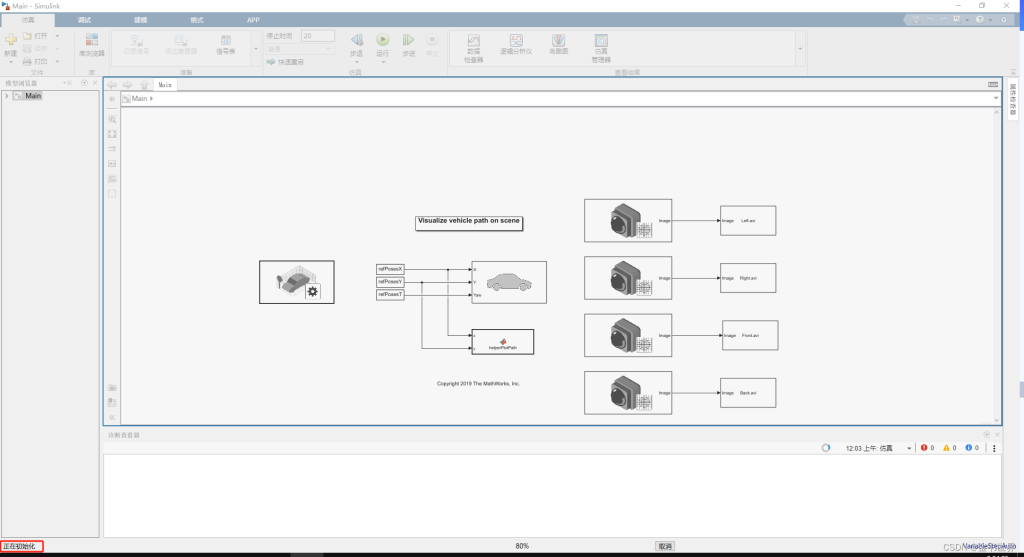
4、打开后显示视图
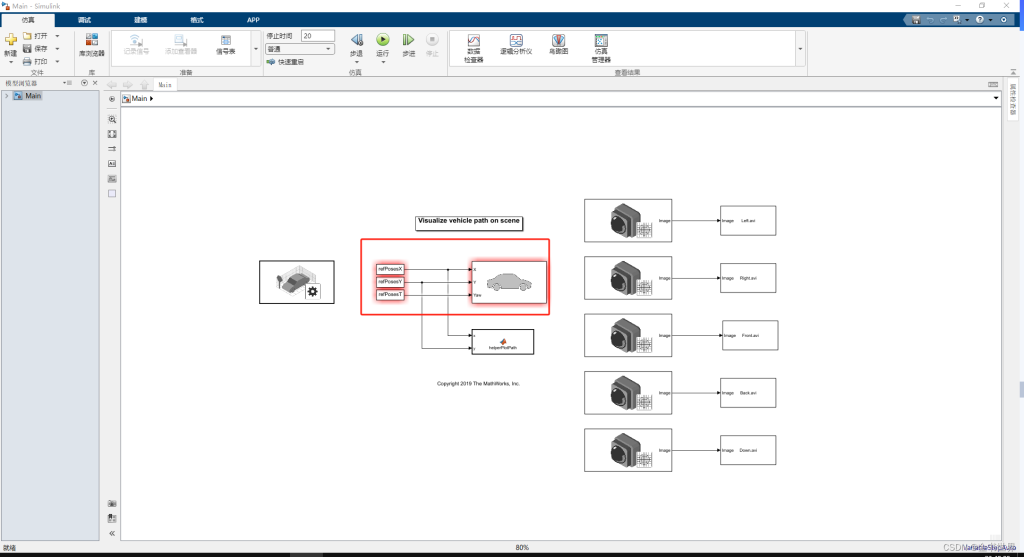
注意显示数据有问题需要打开MATLAB的工程,配置数据
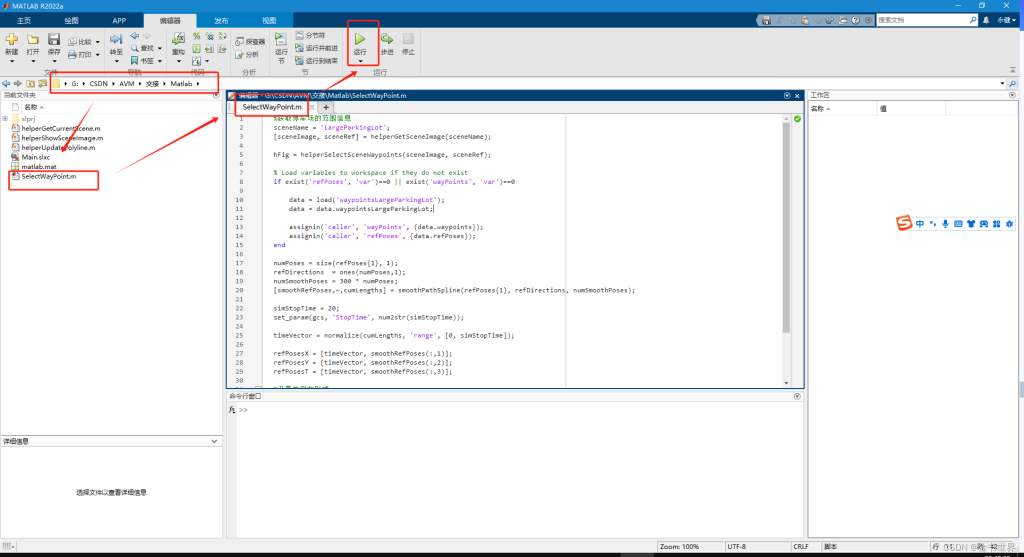
运行后再返回Simulink 点击运行按钮
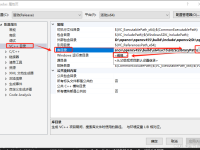
如果出现以下错误需要修改
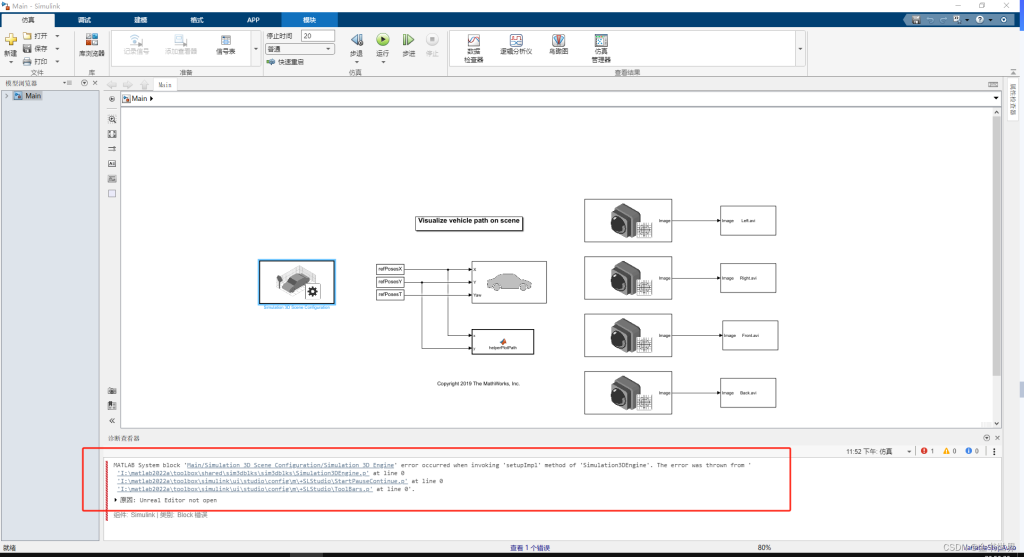
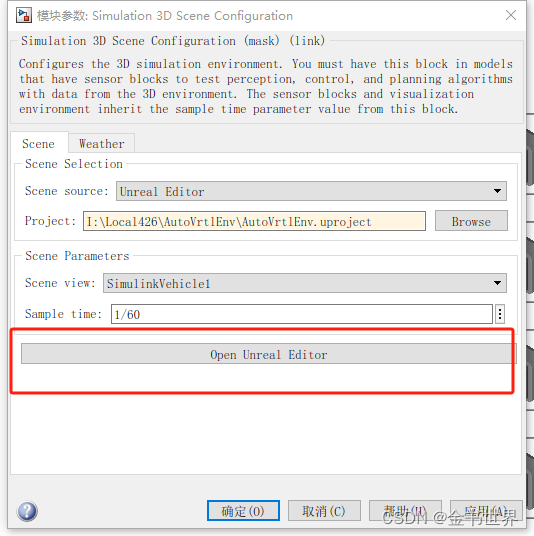
双击打开后配置工程路径
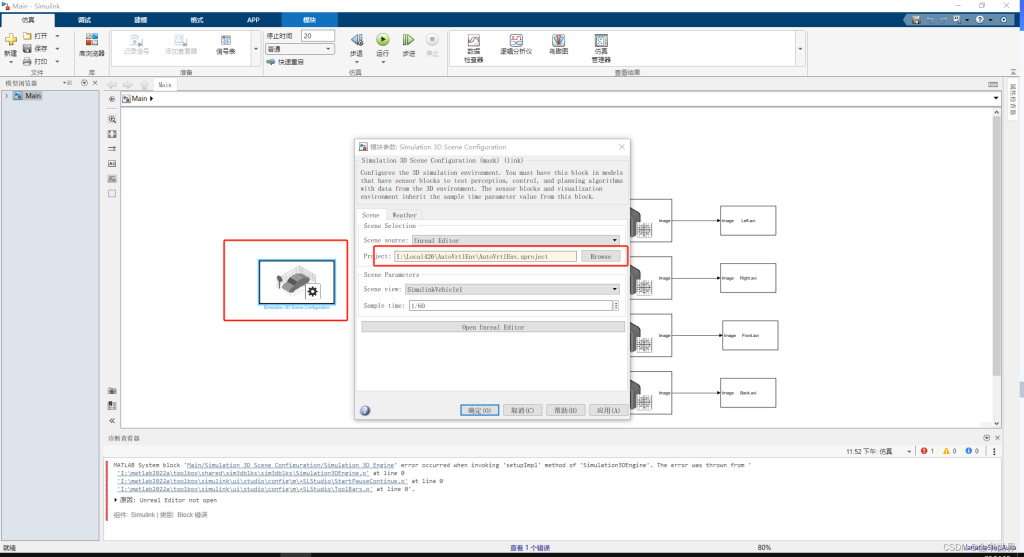
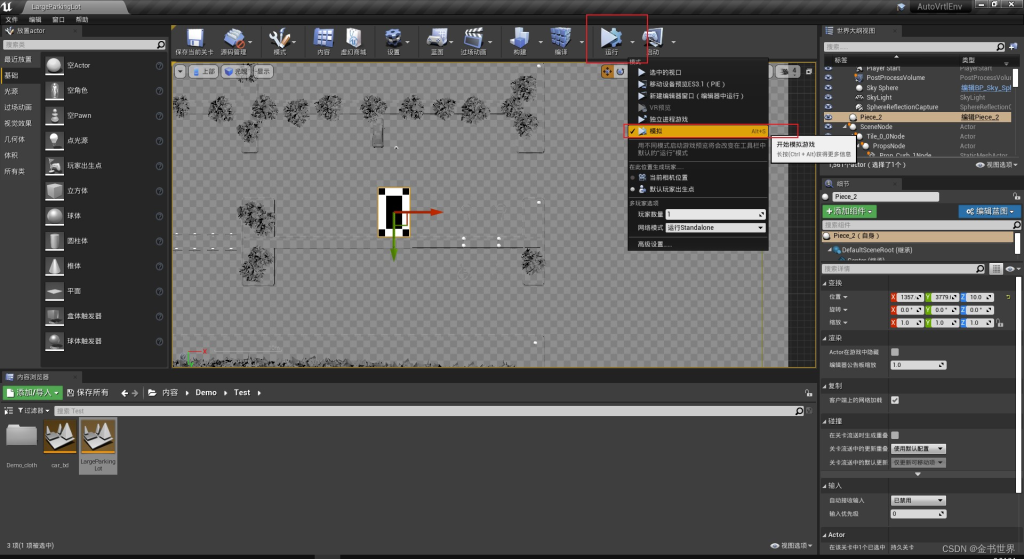
点击一下按钮打开UE4
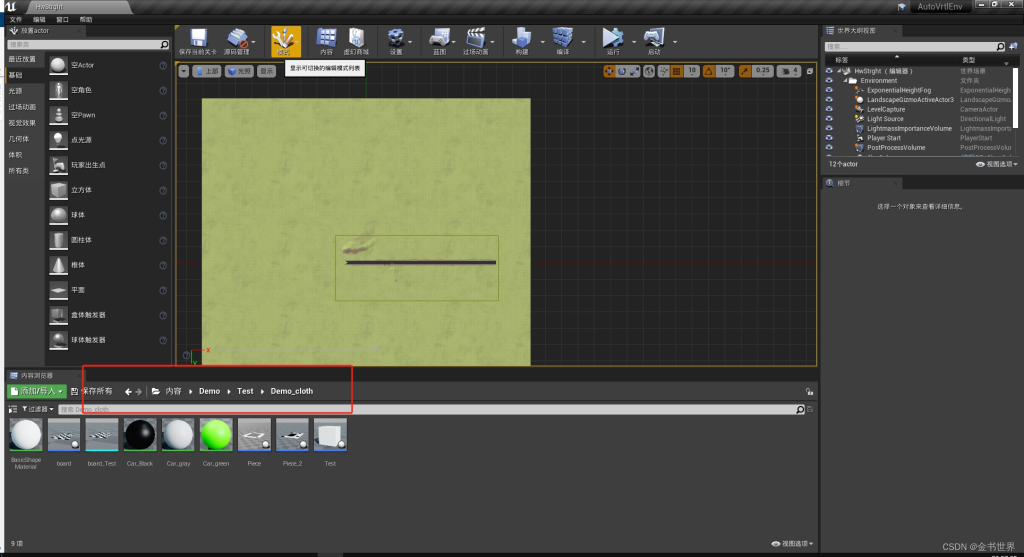
打开后显示如下所示:
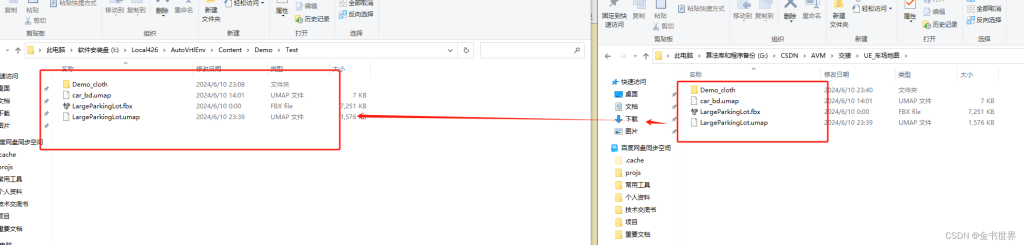
这个位置需要将工程文件复制到一下路径,路径不存在的需要创建
找到以下位置双击
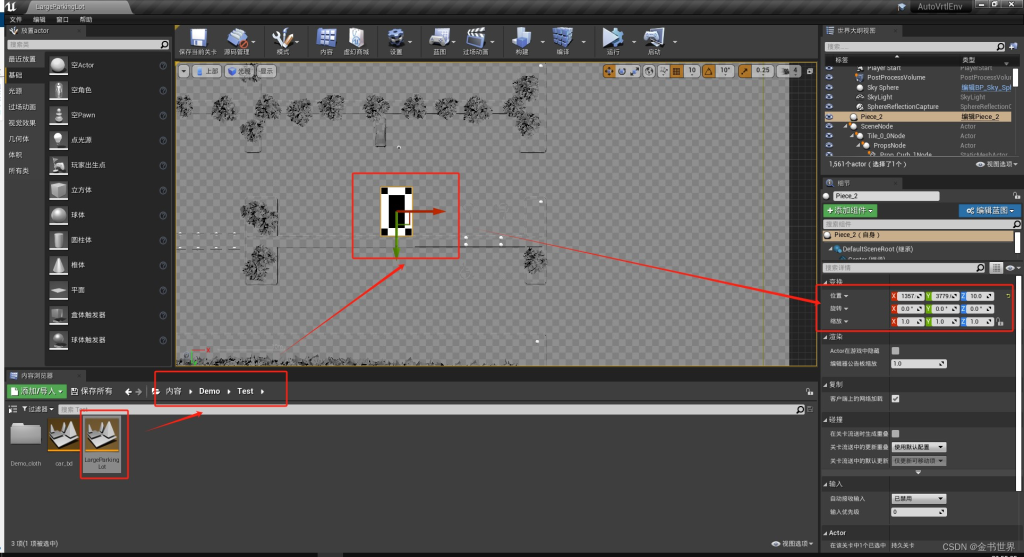
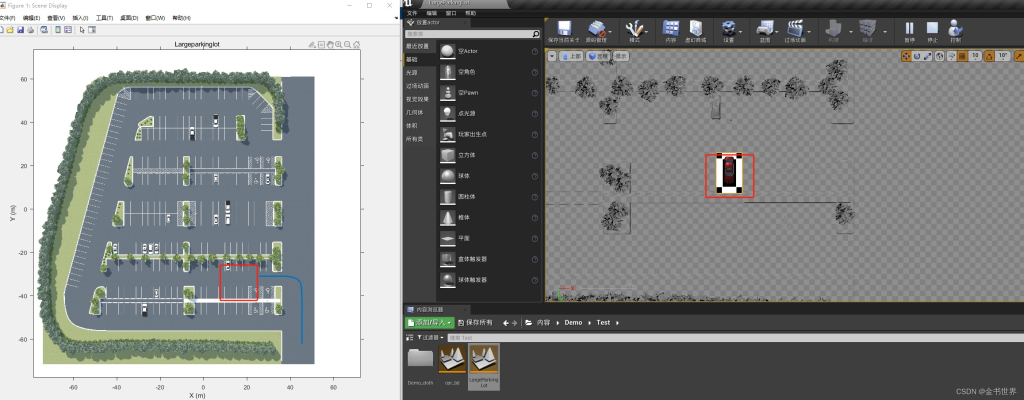
当前标定布的位置是根据生成的数据位置配置,数据来源是在MATLAB的录像轨迹

再回到Simulink 点击运行按钮,当界面左下角出现以下字样后
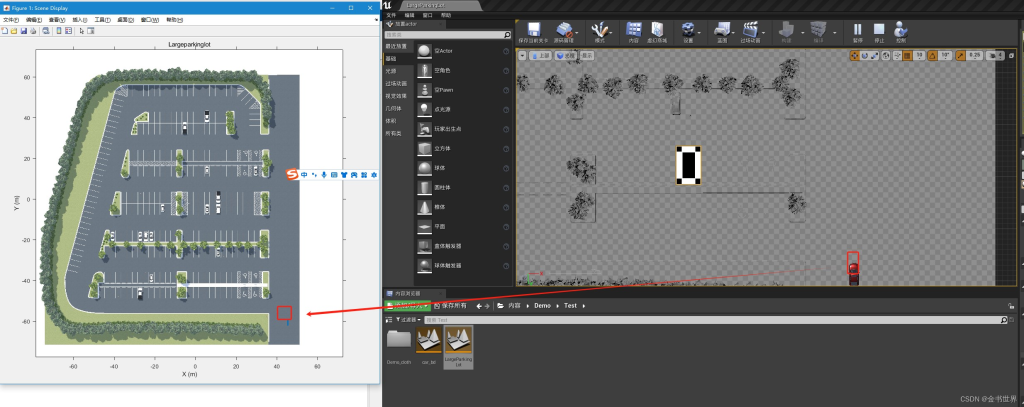
进入到UE4的工程开始模拟运行
小车根据估计运行,之后运行到标定布的位置停止运行
相机的参数配置参见之前的相机部署
前视:[2.5, 0, 1][0, 25, 0][160,-0.002, 0, 0]
后视:[-2.5, 0, 1][0, 25, -180][160,-0.002, 0, 0]
左视:[0, 1.2, 1][0, 25, 90][160, -0.002, 0, 0]
右视:[0, -1.2, 1][0, 25, -90][160,-0.002, 0, 0]
底盘:[0, 0, 0.3][0,90, 0][160,-0.002, 0, 0]标定布图片
如需要测试工程和标定布视频和图片文件工程可以下载获取
链接:https://pan.baidu.com/s/167njZqhsOb2aWz1tfiPymQ
提取码:jdtj
-=||=-赞 (3)